

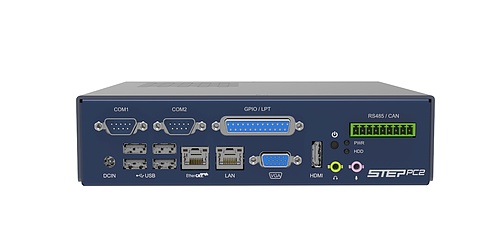
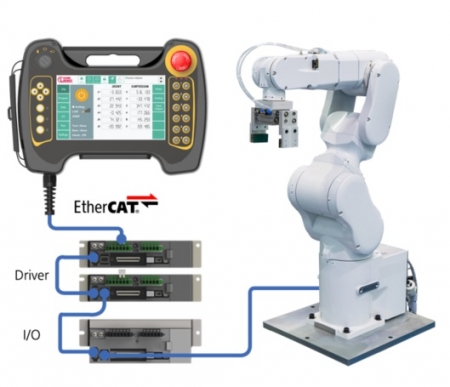
본 제품은 실시간 제어가 요구되는 자동화 시스템 및 로봇을 위해 설계된
실시간 리눅스 EtherCAT 마스터 제어기입니다.
직관적인 방법으로 CoE (CANopen-over-EtherCAT) 기반의 실시간 제어프로그램을 실행할 수 있는 실시간 EtherCat 마스터 스택이 설치되어 있습니다.
쉽고 빠르게 임베디드 제어 프로그램의 개발을 위해 MS 윈도우에서 작동되는 개발환경을 제공합니다. STEP 플랫폼에서 구동되는 임베디드 로봇제어 알고리즘을 구현하기 위한NRMKFoundation SDK를 추가할 수 있습니다.
STEP 제어기는 다양한 디바이스들을 연결하기 위해 RS485 및 CAN 인터페이스를 제공하며, CanOpen 프레임워크 SW인 CanFestival이 설치되어 있습니다.








- : 09:00~18:00(토,일,공휴일 휴무)
- : 1644-0889
- : yeogie@yeogie.com
copyright © 2006 여기에., all rights reserved.