

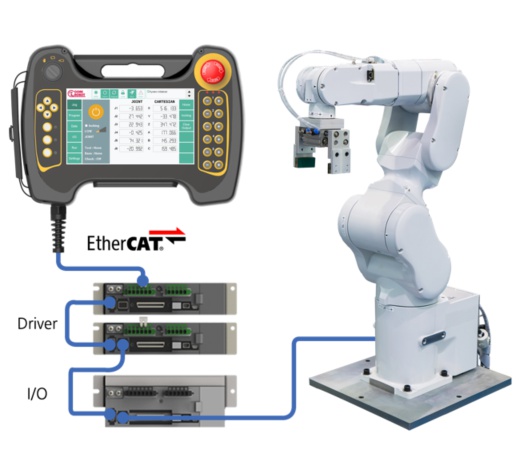
■Motion Controller 와 Teach Pendant 일체형
■EtherCAT MAster적용·EtherCAT Slave가 지원되는 드라이브 모터를 고객이 직접 선택 가능
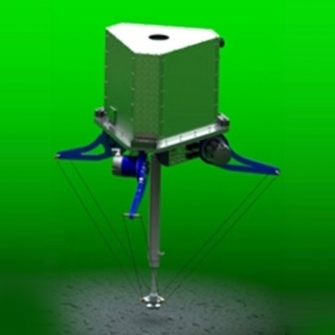
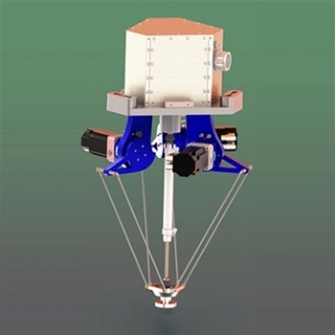
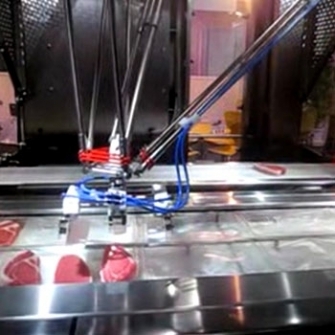
■동일한 UI 로 직교, 스카라, 델타, 수직다관절, 취출, Gantry, WTR 사용
(간단하게 설정 변경)
■Joint / base / tool 좌표를 기준으로 Teaching 가능하고,
Job 프로그램 직접 편집 가능
■C / C++ 등의 프로그램에 숙련되지 않은 개발자도 간단한 로봇 전용 언어 사용으로 프로그램 가능
■풍부한 로봇 언어 지원
(Motion 동작·설정, I/O, 함수, 구조, 연산, 변수, 상수 등)






- : 09:00~18:00(토,일,공휴일 휴무)
- : 1644-0889
- : yeogie@yeogie.com
copyright © 2006 여기에., all rights reserved.